| 研究目標 隨著巡檢任務日益複雜,機器人需要具備更高級的自主決策與資源調度能力。本團隊致力於建構一套混合式代理AI (Agentic AI)架構,將環境感知、語義導航與邏輯推論等模組封裝為可獨立調用的功能函式庫,賦予AI Agent透過「工具使用(Tool Use)」機制自主調度各項技術模組的能力。本研究規劃採用參數高效微調(PEFT)與監督式微調(SFT)技術,優化輕量級大型語言模型(LLM),使其能精準掌握指令語法與決策邏輯,成為機器人的智慧決策中樞。 在運算架構與穩定性方面,本研究將導入雲邊協同(Cloud-Edge Collaboration) 機制,讓Agent能根據任務屬性動態分配運算資源:針對需低延遲反應的避障與導航點生成,於邊緣端即時處理;而複雜的情境理解則自動卸載至雲端模型進行深度推論,藉此平衡系統的即時性與準確度。此外,針對長時間巡檢的續航與負載挑戰,本研究亦致力於開發能源感知與動態資源配置演算法。透過即時監控電力與算力狀態,Agent具備自主觸發「降級運作策略」的能力,在資源受限時優先保障關鍵安全監控功能。本實驗室最終期望實現機器人從被動指令執行到主動環境治理的跨越,建立一套具備自主異常檢測、彈性資源管理與高度強健性的智慧化巡檢系統。 |
||
|
||
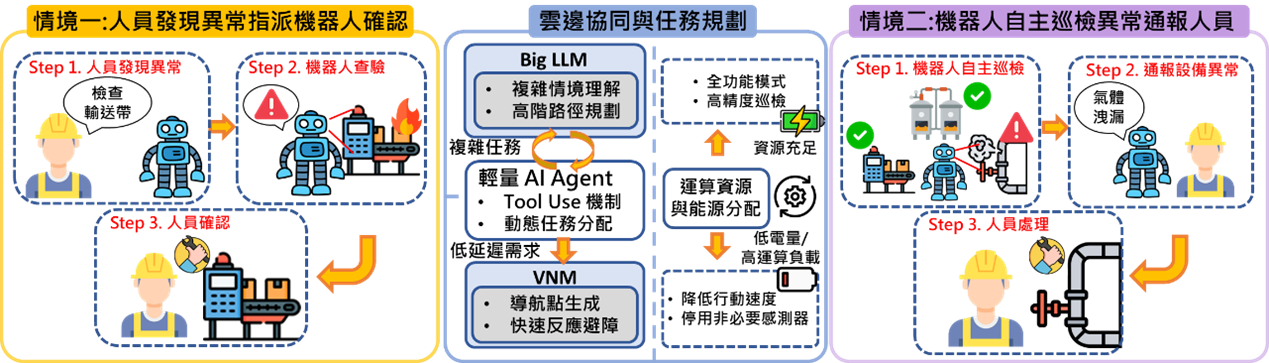
圖1、基於Agent架構之巡檢機器人系統與環境異常偵測情境示意圖 |
||
|---|---|---|